Дослідження прямолінійного рівноприскореного руху
Завідувач відділу створення навчально-тематичних систем знань НЦ «Мала академія наук України», кандидат педагогічних наук, голова Всеукраїнської громадської організації «Асоціація учителів фізики “Шлях освіти – ХХІ”». Наукові інтереси: моделювання освітніх та навчальних середовищ загальноосвітніх і позашкільних навчальних закладів з урахуванням трендів розвитку сучасних засобів навчання.
Завдання роботи:
- Ознайомитися з правилами створення відеозапису руху тіла.
- Створити відеозапис рівноприскореного руху або завантажити готовий з ресурсу.
- За допомогою програмного забезпечення для аналізу відеозаписів отримати графік руху тіла та графік швидкості тіла.
- Використовуючи математичний апарат програмного забезпечення, обчислити прискорення руху тіла графічним методом.
Обладнання:
ПК, цифровий фотоапарат або відеокамера, лінійка, іграшковий автомобіль або інші тіла, рух яких буде досліджуватися, Tracker (http://physlets.org/tracker/)
Теоретична частина
Загальні відомості

Рис. 1. Зовнішній вигляд вікна програми Tracker
Tracker – це безкоштовний інструмент аналізу відео, побудований на платформі Java Open Source Physics (OSP). Він призначений для використання у фізиці та інших галузях, де вивчаються рухомі об’єкти. Tracker також має можливість об’єднати відео з комп’ютерним моделюванням.
Особливостями вказаного програмного забезпечення є:
- ручне та автоматичне відстеження об’єктів із накладанням маркерів позиції, швидкості та прискорення;
- моделювання з можливістю створення кінематичних та динамічних моделей руху матеріальних точок і двокомпонентних систем. Накладені моделі автоматично синхронізуються та масштабуються у відео для прямого візуального порівняння з реальним процесом.
- використання відеофільтрів, які враховують перспективні спотворення та ефект об’єктиву типу «риб’яче око»;
- можливість використання вимірювальних інструментів, таких як лінійка, транспортир;
- потужний інструмент аналізу даних, який містить автоматичні та ручні настройки кривих;
- використання ресурсів цифрових бібліотек.
У цій роботі зазначене програмне забезпечення буде використовуватися для визначення прискорення руху іграшкового автомобіля, якого він набуває при русі з положення спокою за рахунок пружинного рушія або будь-якого іншого рухомого тіла, яке використовується при виконанні роботи.
Прямолінійний рівноприскорений рух тіла характеризується величиною і напрямком прискорення. Для аналізу цього руху обирають вісь координат Ох так, щоб вона була паралельною траєкторії руху тіла. У цьому випадку вираз для визначення значення проекції миттєвої швидкості руху має вигляд:
![]() (1) .
(1) .
Графіком швидкості тіла буде відрізок прямої, нахилений під певним кутом до осі часу, оскільки ця залежність є лінійною. За умови, якщо тіло розпочинає свій рух зі стану спокою, графік розпочинається з початку координат. Кут нахилу графіка визначається значенням проекції прискорення руху тіла. Встановивши вигляд рівняння прямої, можна визначити знак та значення проекції прискорення руху тіла. Рівняння руху тіла при рівноприскореному русі має вигляд квадратичної залежності:
![]() (2).
(2).
Тому графіком руху тіла буде частина параболи. Встановивши вигляд рівняння цієї параболи, також можна визначити знак та значення проекції прискорення руху тіла.
Хід роботи
Частина 1. Отримання відеозапису
- Установіть на поверхні столу лінійку, попередньо з’ясувавши її довжину.
- Надайте пружині двигуна автомобіля невеликого стиснення, обертаючи колеса автомобіля, і встановіть його поверх лінійки. Відпустіть автомобіль і прослідкуйте, щоб він рухався вздовж лінійки.
- Оберіть пристрій, яким ви будете виконувати відеозйомку. З’ясуйте якість об’єктива для подальшого врахування можливих спотворень. З’ясуйте, з якою частотою буде відбуватися зйомка відео (більшість пристроїв за замовчуванням роблять 30 кадрів на секунду).
- Установіть пристрій так, щоб лінійка та рухомий автомобіль повністю потрапляли в кадр і в процесі зйомки пристрій не рухався.
- Розпочніть запис відео та повторіть крок 2. Зробіть ще декілька записів для можливості вибору найкращого варіанту. У разі відсутності можливості відеозапису завантажте готове відео з ресурсу.
Частина 2. Опрацювання відео
- Завантажте відео у програму Tracker. Завантаження здійснюється з використанням кнопки Open у верхньому меню програми.
Завантаження можна здійснити також шляхом «перетягування» файлу запису у вікно програми або через меню File → Import → Video. Якщо програма не дозволила завантажити відео, необхідно дібрати інший його формат, що здійснюється шляхом використання редакторів відео.

Рис. 2. Вигляд вікна програми Tracker після завантаження відео
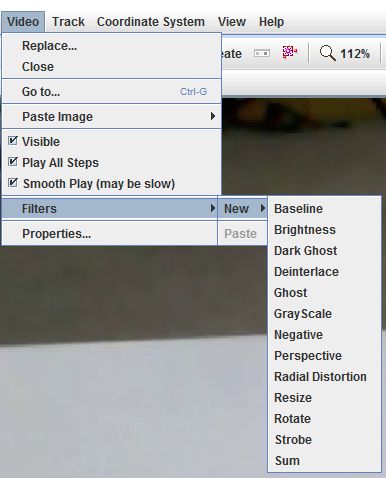
- Використовуючи кнопки керування в нижній частині вікна з відео, перегляньте запис. Якщо об’єктив пристрою для зйомки дає спотворення зображення, використайте відповідний фільтр відео.
- Установіть номер кадру, з якого розпочався рух автомобіля, та номер кадру, коли він доїхав до краю лінійки. Лічильник кадрів розташований у стрічці кнопок керування у вікні відеозапису.

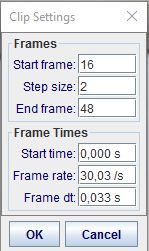
- Оберіть у верхній стрічці кнопку Clip Settings
 . Випаде вікно встановлення меж кадрів відеозапису. Зазначте в ньому номер початкового та кінцевого кадру, крок зміни кадрів (якщо кадрів багато, то крок дає змогу зменшити кількість кадрів для аналізу) та частоту зйомки (за замовчуванням програма сама обирає цей параметр із властивостей відеозапису). Оберіть Ok.
. Випаде вікно встановлення меж кадрів відеозапису. Зазначте в ньому номер початкового та кінцевого кадру, крок зміни кадрів (якщо кадрів багато, то крок дає змогу зменшити кількість кадрів для аналізу) та частоту зйомки (за замовчуванням програма сама обирає цей параметр із властивостей відеозапису). Оберіть Ok.
- Оберіть у верхній стрічці кнопку Show or hide the coordinate axes
 . На відеозаписі з’являться осі координат. Центр системи координат перетягніть у точку, що якнайкраще відповідатиме ситуації руху автомобіля. Наприклад сумістіть її з центром переднього колеса автомобіля. Осі координат можуть повертатися. Програйте момент руху до кінцевого кадра та «проверніть» вісь так, щоб вона проходила через цю ж точку на кінцевому кадрі. Повертати систему координат можна, обравши вісь маніпулятором. Додатний напрямок на осі визначається короткою рискою на ній. Повторно оберіть кнопку Show or hide the coordinate axes . Система координат зникне, але її положення програма запам’ятовує.
. На відеозаписі з’являться осі координат. Центр системи координат перетягніть у точку, що якнайкраще відповідатиме ситуації руху автомобіля. Наприклад сумістіть її з центром переднього колеса автомобіля. Осі координат можуть повертатися. Програйте момент руху до кінцевого кадра та «проверніть» вісь так, щоб вона проходила через цю ж точку на кінцевому кадрі. Повертати систему координат можна, обравши вісь маніпулятором. Додатний напрямок на осі визначається короткою рискою на ній. Повторно оберіть кнопку Show or hide the coordinate axes . Система координат зникне, але її положення програма запам’ятовує.
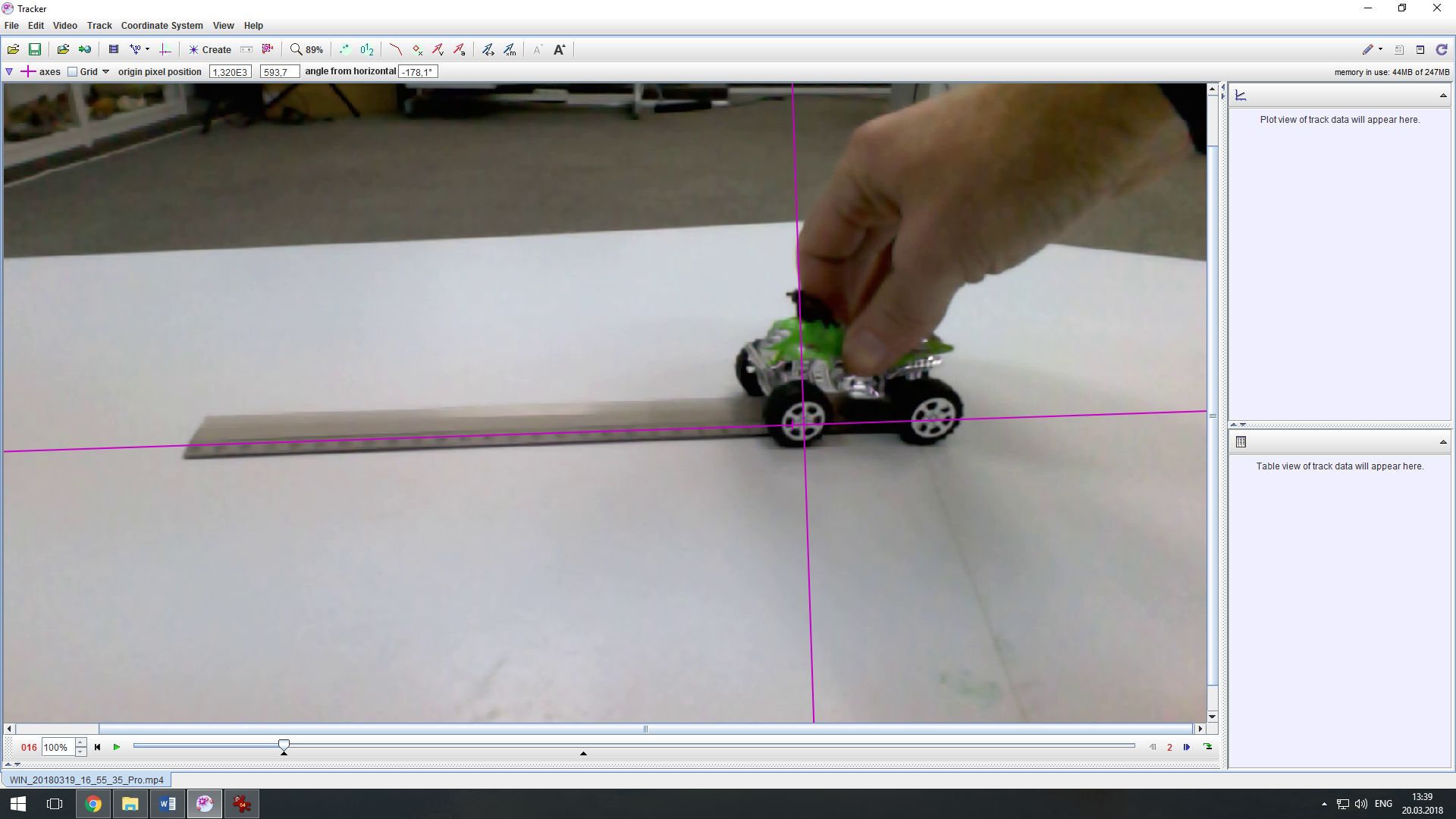
Рис. 3. Вигляд вікна програми Tracker після встановлення положення системи координат
- Оберіть у верхній стрічці кнопку Show, hide or create calibration tools
 та в меню – New → Calibration Stick. Програма запропонує, утримуючи клавішу Shift, обрати на зображенні першу та другу точку для одиничного відрізка. На відео з’явиться відрізок. Над відрізком необхідно в цифровому полі ввести значення довжини цього відрізку в метричній системі. Кінці відрізка можна вільно переміщувати «перетягуванням» по зображенню. Оберіть повторно кнопку Show, hide or create calibration tools . Одиничний відрізок зникне, але програма запам’ятає його положення та довжину.
та в меню – New → Calibration Stick. Програма запропонує, утримуючи клавішу Shift, обрати на зображенні першу та другу точку для одиничного відрізка. На відео з’явиться відрізок. Над відрізком необхідно в цифровому полі ввести значення довжини цього відрізку в метричній системі. Кінці відрізка можна вільно переміщувати «перетягуванням» по зображенню. Оберіть повторно кнопку Show, hide or create calibration tools . Одиничний відрізок зникне, але програма запам’ятає його положення та довжину.
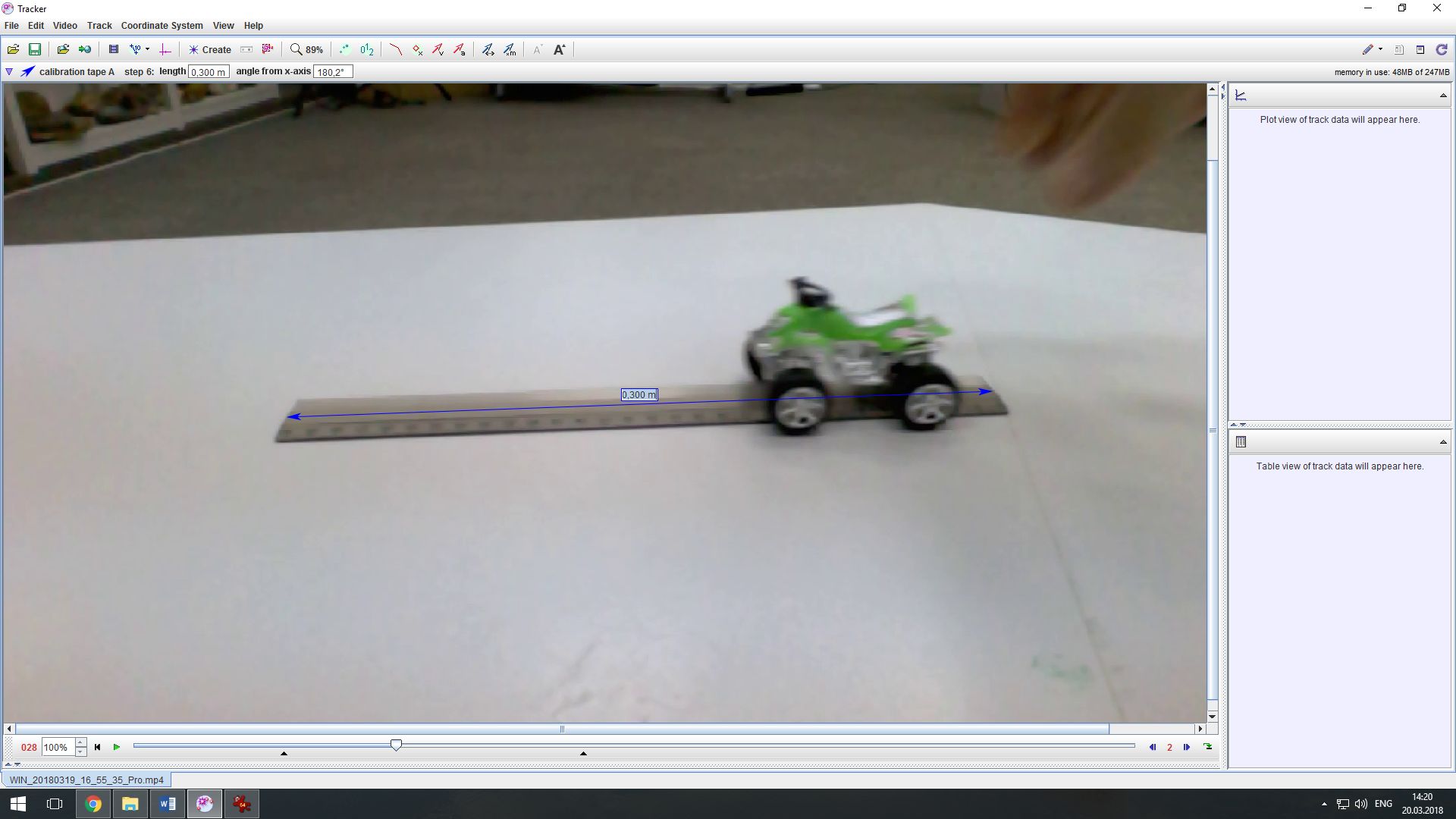
Рис. 4. Вигляд вікна програми Tracker після встановлення одиничного відрізка
- Для відстежування руху автомобіля оберіть у верхньому меню кнопку Create і у меню – Point Mass.

- У лівому кутку з’явиться вікно Track Control.
- Натисніть клавішу Shift. Курсор набуде вигляду невеликої рамки. Сумістіть цю рамку з точкою, за якою ви буде стежити, і натисніть ліву кнопку маніпулятора. На зображенні з’явиться маркер точки і програма автоматично перейде на наступний кадр. Повторюйте ці кроки до останнього обраного кадру.
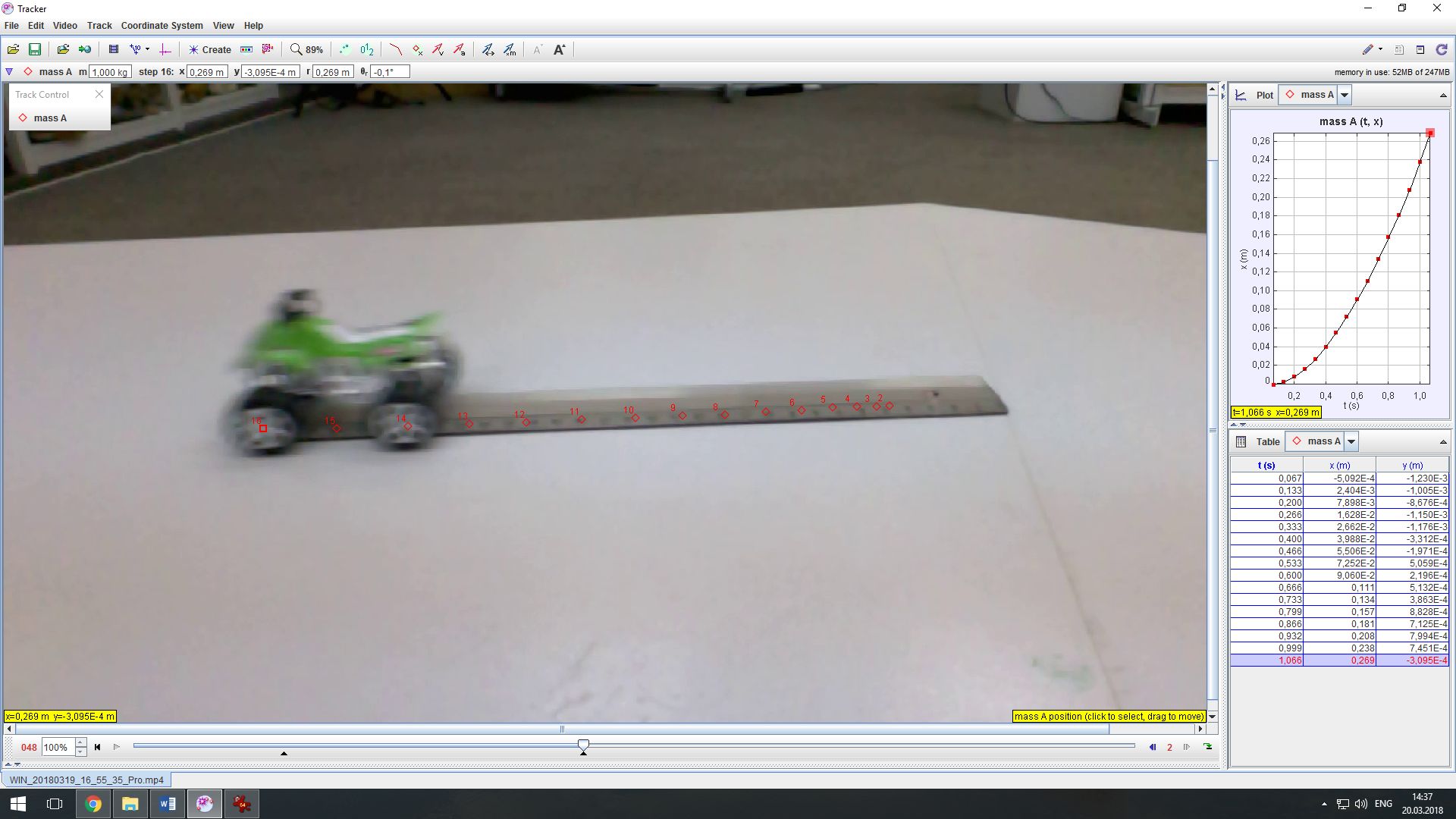
Рис. 5. Вигляд вікна програми Tracker після відстежування руху автомобіля
- У вікнах правої частини з’являться графік і таблиця, з якими надалі буде проводитися аналіз отриманих даних. Якщо вісь координат ОХ обрана вздовж руху автомобіля і спрямована в напрямку його руху, то графік матиме такий вигляд, як на рис. 5.
Аналіз даних
- Оберіть у верхньому меню View → Data Tool (Analyze…).
- З’явиться нове вікно Data Tool з графіком і таблицею.
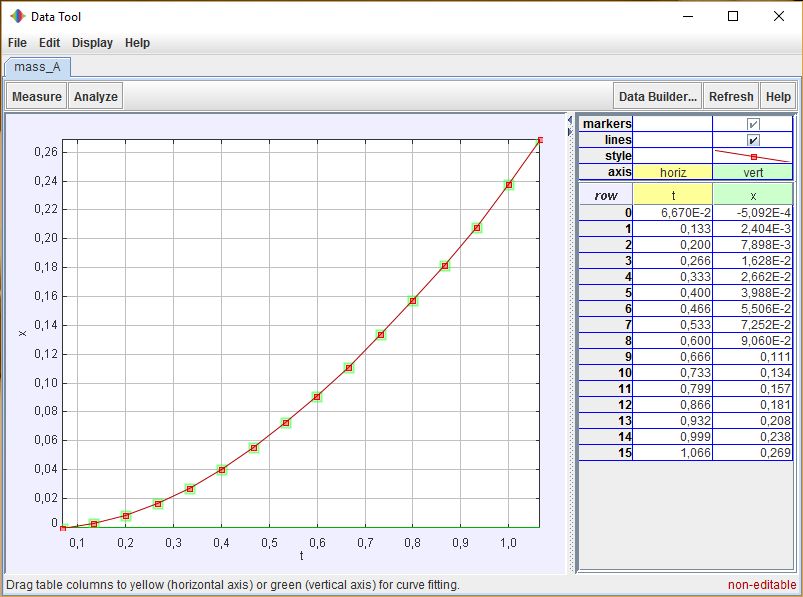
Рис. 6. Вигляд вікна Data Tool
- Оскільки графік x(t) є частиною параболи, то рух, який він описує, буде рівноприскореним. Як зазначалося попередньо, рівняння руху автомобіля (2) у такому випадку матиме вигляд квадратичної функції. У загальному вигляді функція має запис f(x) = Ax2 + Bx + C . Бачимо, що коефіцієнт A = aх/2 . Звідси проекція прискорення aх = 2A. Для визначення прискорення автомобіля необхідно знайти коефіцієнт А та помножити його на 2. Для визначення цього коефіцієнта накладемо на графік параболу.
- Оберіть вкладинку Analyse → Curve Fits та в нижній частині вікна Fit Name → Parabola. Поверх графіку руху з’явилася парабола та під нею – значення коефіцієнтів. Зверніть увагу на те, щоб біля надпису Autofit обов’язково стояв маркер. Це означає, що програма самостійно добере положення параболи.
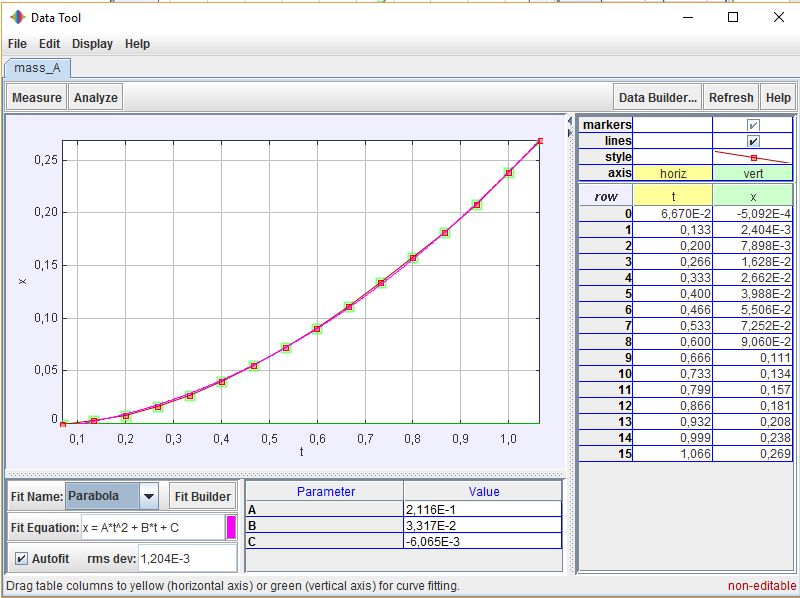
Рис. 7. Вигляд вікна Data Tool після накладання параболи
- Розрахуйте прискорення руху автомобіля за коефіцієнтом А та зазначте його у висновку. Запис значення коефіцієнта здійснюється у стандартному вигляді.
- Закрийте вікно Data Tool та перейдіть до вікна графіка у правій частині основного вікна. Обравши позначку вертикальної осі, виберіть із списку величин проекцію миттєвої швидкості на вісь vx . У правій частині з’явиться графік швидкості тіла. Оскільки програма для його побудови бере значення зміни координат точок, що відзначалися вами при оброці відео протягом однакових проміжків часу, точки графіка не обов’язково будуть утворювати пряму.
- Відкрийте знову вікно Data Tool та видаліть у верхній частині таблиці позначки біля колонки координат, щоб залишився тільки графік швидкості.
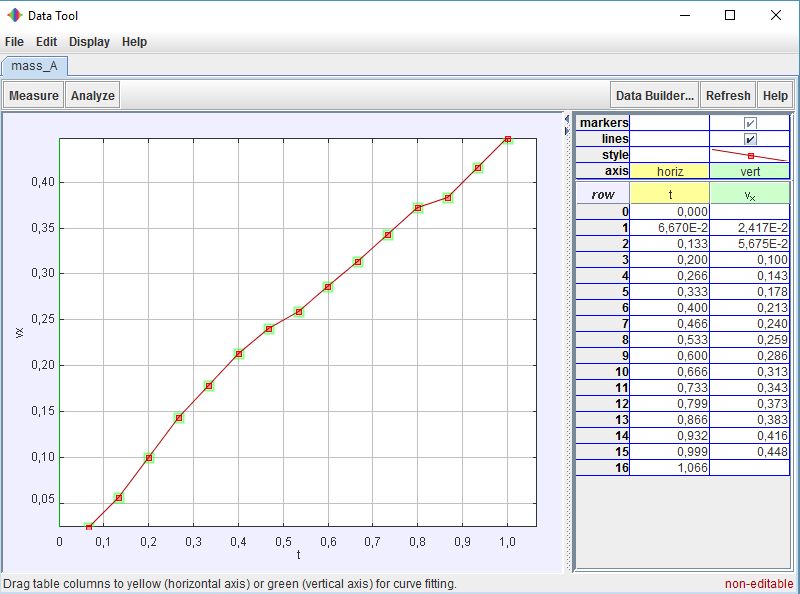
Рис. 8. Вигляд вікна Data Tool для проекції швидкості
- Оберіть вкладинку Analyse → Curve Fits та в нижній частині вікна Fit Name → Line. Поверх графіку руху з’явилася пряма та під нею – значення коефіцієнтів.
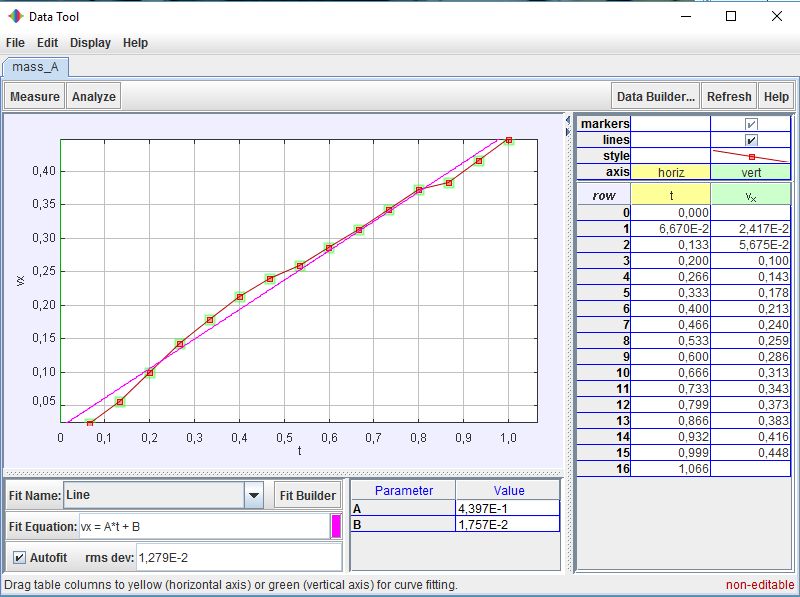
Рис. 9. Вигляд вікна Data Tool після накладання прямої
- У загальному вигляді рівняння (1) має вигляд лінійної функції f(x) = Ax + B, де коефіцієнт A і є прискорення руху тіла. Його значення може відрізнятися від значення, отриманого при накладанні параболи на графік руху тіла, в силу умов побудови графіка. Тому більш точним значенням буде саме значення, отримане при накладанні параболи.