Дослідження руху тіла, кинутого вертикально вгору
Завідувач відділу створення навчально-тематичних систем знань НЦ «Мала академія наук України», кандидат педагогічних наук, голова Всеукраїнської громадської організації «Асоціація учителів фізики “Шлях освіти – ХХІ”». Наукові інтереси: моделювання освітніх та навчальних середовищ загальноосвітніх і позашкільних навчальних закладів з урахуванням трендів розвитку сучасних засобів навчання.
Завдання роботи:
- Провести експеримент із тілом, кинутим вертикально вгору, та створити його відеозапис.
- Визначити за допомогою інструментів програми початкову швидкість руху тіла.
- Визначити за допомогою інструментів програми максимальну висоту підйому тіла та розрахувати за нею початкову швидкість руху. Порівняти значення швидкостей.
- Створити модель руху тіла та порівняти її з експериментальними даними.
Обладнання:
гумовий м’яч-стрибунець, лінійка, штатив, ПК, цифровий фотоапарат або відеокамера, Tracker (http://physlets.org/tracker/)
Теоретична частина
Загальні відомості

Рис. 1. Зовнішній вигляд вікна програми Tracker
У цій роботі зазначене програмне забезпечення буде використовуватися для визначення початкової швидкості руху гумової кульки після відскоку від поверхні столу та для створення динамічної моделі, що відповідає цій ситуації. Рух кульки відбувається у повітрі, тому побудова моделі тільки з урахуванням поля сил тяжіння буде незначно, але відрізнятися від результату реального експерименту. Одним із завдань роботи є створення динамічної моделі та добір параметрів, що можуть впливати на рух.
Рух тіла, кинутого вертикально вгору, відбувається в полі сил тяжіння. В ідеалізованій моделі, що не враховує впливу середовища, максимальна висота підняття кульки залежить винятково від її початкової швидкості та обчислюється за виразом:
 ,
,
звідки
![]() .
.
Тобто для визначення початкової швидкості достатньо встановити максимальну висоту підняття тіла. Це можна зробити за відеозаписом, безпосереднім вимірюванням положення тіла. Однак значення початкової швидкості також присутнє у рівнянні руху тіла в проекціях на вертикальну вісь:
![]()
Інструменти програми дають змогу, відслідкувавши рух тіла на певній ділянці, отримати графік його руху. За конкретним записом функції, що відповідає графіку руху, також нескладно отримати значення початкової швидкості як одного із коефіцієнтів, що входять у запис.
Хід роботи
Частина 1. Отримання відеозапису
- Установіть штатив та лінійку з добре помітними поділками строго вертикально.
- Оберіть пристрій, яким ви будете виконувати відеозйомку. З’ясуйте якість об’єктива для подальшого врахування можливих спотворень. Використайте максимально можливу частоту зйомки відео (240-1000 кадрів на секунду).
- Установіть пристрій так, щоб лінійка та кулька повністю потрапляли в кадр і в процесі зйомки пристрій не рухався.
- Розпочніть запис відео. Піднесіть кульку до початку лінійки та вільно відпустіть. Захопіть момент її першого та другого удару об поверхню столу. Зробіть ще декілька записів для можливості вибору найкращого варіанту. У разі відсутності можливості відеозапису завантажте готове відео з ресурсу.
Частина 2. Опрацювання відео
- Завантажте відео у програму Tracker. Завантаження здійснюється з використанням кнопки Open у верхньому меню програми. Завантаження можна здійснити також шляхом «перетягування» файлу запису у вікно програми або через меню File → Import → Video. Якщо програма не дозволила завантажити відео, необхідно дібрати інший його формат, що здійснюється шляхом використання редакторів відео.
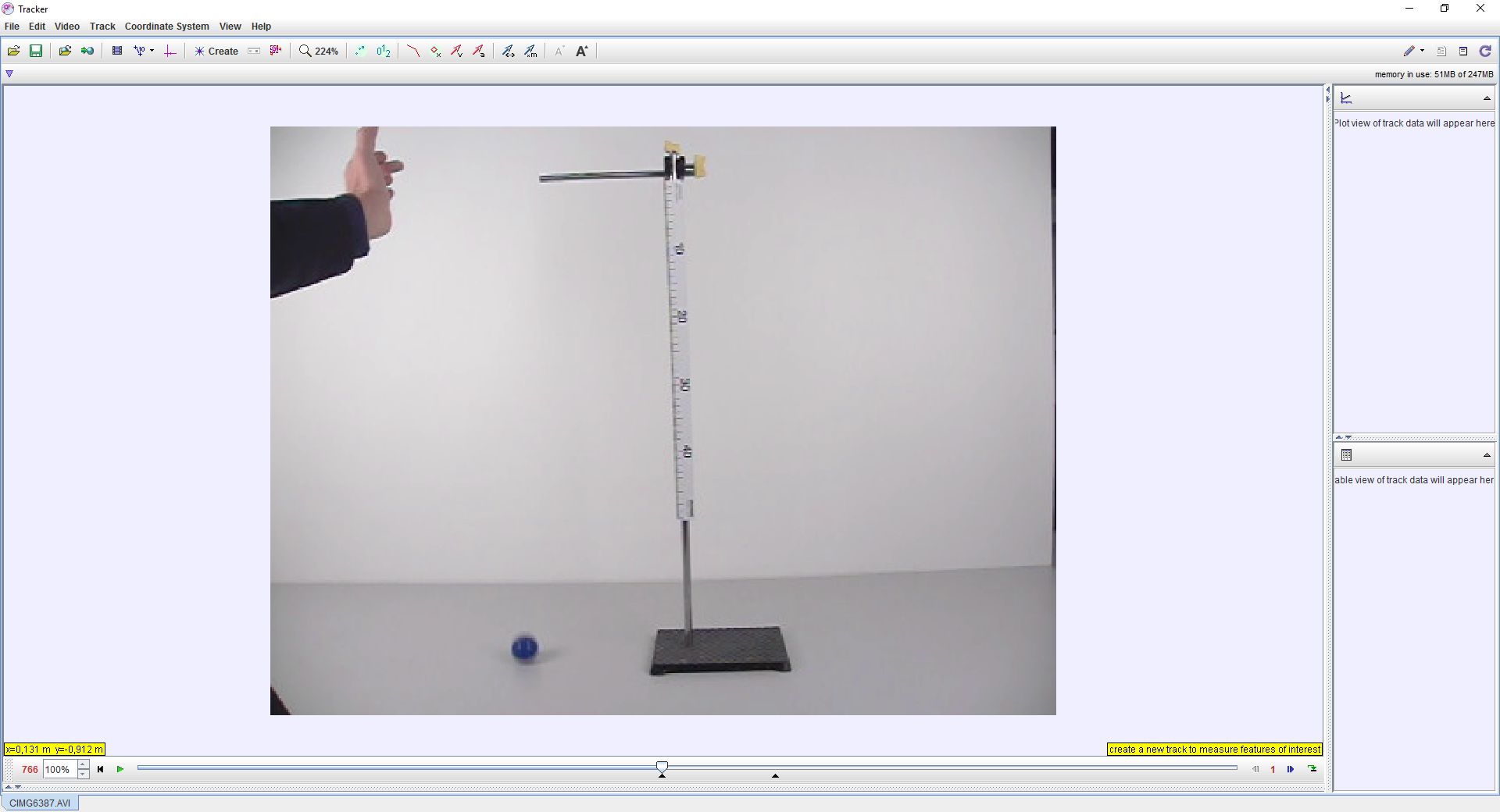
Рис. 2. Вигляд вікна програми Tracker після завантаження відео
6. Використовуючи кнопки керування в нижній частині вікна з відео, перегляньте запис.
7. Якщо об’єктив пристрою для зйомки дає спотворення зображення, використайте відповідний фільтр відео.
8. Установіть номер кадру, з якого розпочався вертикальний рух кульки вгору, та номер кадру, коли кулька вдарилася повторно. Лічильник кадрів розташований у стрічці кнопок керування у вікні відеозапису.
9. Оберіть у верхній стрічці кнопку Clip Settings ![]() . Випаде вікно встановлення меж кадрів відеозапису. Зазначте в ньому номер початкового та кінцевого кадру, крок зміни кадрів (якщо кадрів багато, то крок дає змогу зменшити кількість кадрів для аналізу) та частоту зйомки (за замовчуванням програма сама обирає цей параметр із властивостей відеозапису). У цьому експерименті бажано обрати велику кількість точок, що дає можливість зробити функція автотрекінгу, роботу з якою буде застосовано пізніше. Оберіть Ok.
. Випаде вікно встановлення меж кадрів відеозапису. Зазначте в ньому номер початкового та кінцевого кадру, крок зміни кадрів (якщо кадрів багато, то крок дає змогу зменшити кількість кадрів для аналізу) та частоту зйомки (за замовчуванням програма сама обирає цей параметр із властивостей відеозапису). У цьому експерименті бажано обрати велику кількість точок, що дає можливість зробити функція автотрекінгу, роботу з якою буде застосовано пізніше. Оберіть Ok.
10. Оберіть у верхній стрічці кнопку Show or hide the coordinate axes ![]() . На відеозаписі з’являться осі координат. Центр системи координат перетягніть у точку, що якнайкраще відповідатиме ситуації. Наприклад, сумістіть її з центром тіла на початку руху. Осі координат можуть повертатися. Додатний напрямок на осі визначається короткою рискою на ній. Повторно оберіть кнопку Show or hide the coordinate axes. Система координат зникне, але її положення програма запам’ятовує.
. На відеозаписі з’являться осі координат. Центр системи координат перетягніть у точку, що якнайкраще відповідатиме ситуації. Наприклад, сумістіть її з центром тіла на початку руху. Осі координат можуть повертатися. Додатний напрямок на осі визначається короткою рискою на ній. Повторно оберіть кнопку Show or hide the coordinate axes. Система координат зникне, але її положення програма запам’ятовує.
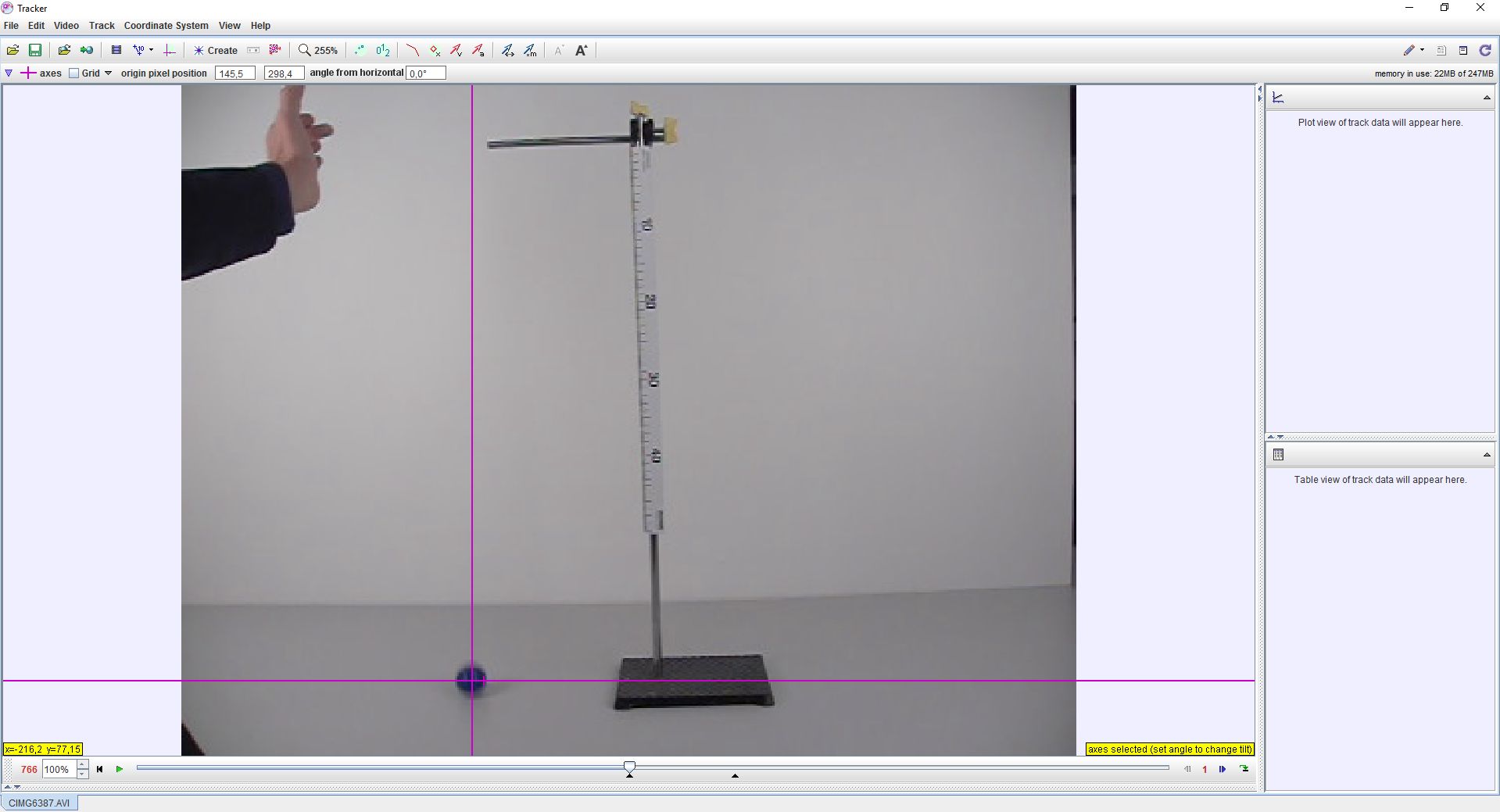
Рис. 3. Вигляд вікна програми Tracker після встановлення положення системи координат
11. Оберіть у верхній стрічці кнопку Show, hide or create calibration tools ![]() та в меню – New → Calibration Stick. Програма запропонує, утримуючи клавішу Shift, обрати на зображенні першу та другу точку для одиничного відрізка. На відео з’явиться відрізок. Над відрізком необхідно в цифровому полі ввести значення довжини цього відрізка в метричній системі. Кінці відрізка можна вільно переміщувати «перетягуванням» по зображенню. Оберіть повторно кнопку Show, hide or create calibration tools
та в меню – New → Calibration Stick. Програма запропонує, утримуючи клавішу Shift, обрати на зображенні першу та другу точку для одиничного відрізка. На відео з’явиться відрізок. Над відрізком необхідно в цифровому полі ввести значення довжини цього відрізка в метричній системі. Кінці відрізка можна вільно переміщувати «перетягуванням» по зображенню. Оберіть повторно кнопку Show, hide or create calibration tools ![]() . Одиничний відрізок зникне, але програма запам’ятає його положення та довжину.
. Одиничний відрізок зникне, але програма запам’ятає його положення та довжину.
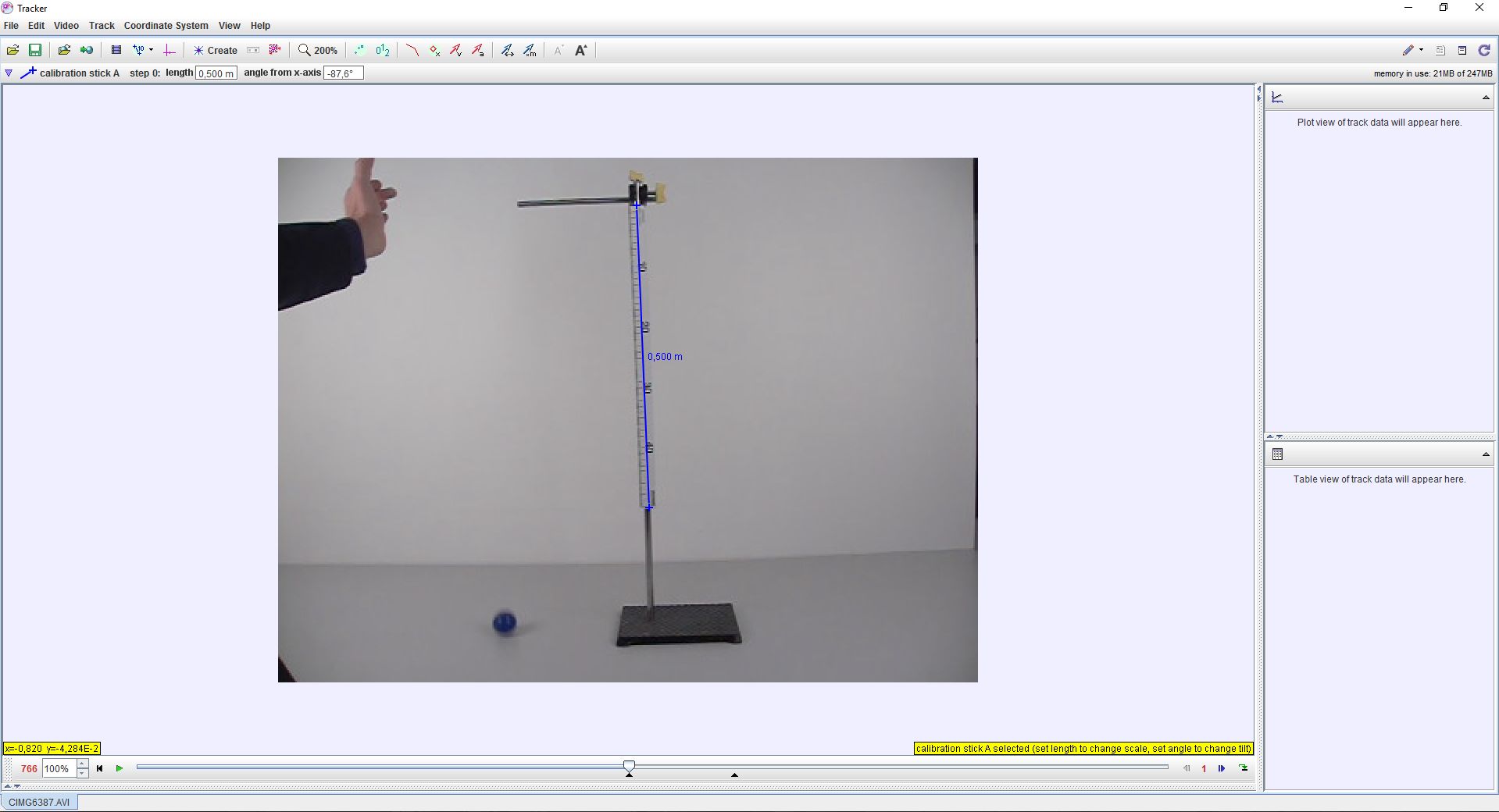
Рис. 4. Вигляд вікна програми Tracker після встановлення одиничного відрізка
12. Для відстежування руху тіла оберіть у верхньому меню кнопку Create і у меню – Point Mass. У лівому кутку з’явиться вікно Track Control.
13. Натисніть клавішу Shift. Курсор набуде вигляду невеликої рамки. Сумістіть цю рамку з точкою, за якою ви буде стежити, і натисніть ліву кнопку маніпулятора. На зображенні з’явиться маркер точки і програма автоматично перейде на наступний кадр.
14. Поверніть запис на перший кадр та оберіть у верхньому меню функцію автотрекінгу, натиснувши кнопку  .
.
15. У робочому вікні з’явиться вікно автотрекінгу.
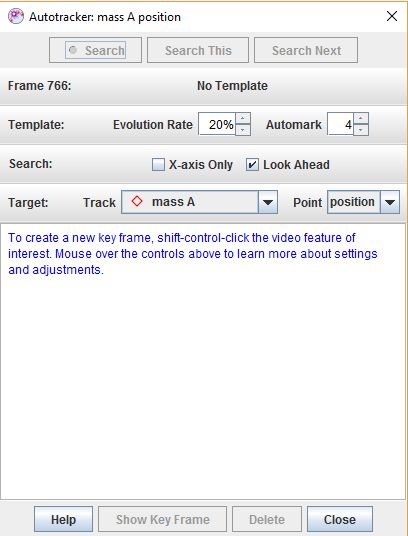
16. У цьому вікні зазначається, що буде відслідковуватися матеріальна точка, яку позначили на першому кадрі. Для подальшої роботи автоматичного відстежування точки необхідно визначити ключовий кадр запису. Натисніть одночасно клавіші Ctrl і Shift. Курсор змінить свій зовнішній вигляд на коло з перехрестям. Укажіть маніпулятором точку і натисніть ліву кнопку маніпулятора. Навколо точки через певний час з’являться коло та пунктирна рамка. Коло буде охоплювати тіло, а рамка вказуватиме окіл на зображенні, у якому програма автоматично шукатиме його присутність. Розмір кола і рамки можна змінювати. У вікні автотрекінгу з’явиться збільшене зображення тіла на першому та наступному кадрі. Якість автотрекінгу залежить від того, наскільки буде змінюватися зображення тіла на кожному кадрі. У разі критичної зміни програма зупинить відстежування тіла і запропонує змінити окіл відстежування.
17. Оберіть у вікні автотрекінгу кнопку Search і дочекайтеся результату. Якщо кількість кадрів для аналізу значна – це потребуватиме певного часу. Якщо при відстежуванні трапився збій, видалити попередні точки можна, обравши в цьому вікні кнопку Delete. Якість роботи автотрекінгу визначається багатьма умовами, але головною є контрастність зображення тіла стосовно заднього фону. Після завершення роботи автотрекінгу закрийте його вікно.
18. У вікнах правої частини з’являться графік і таблиця, з якими надалі буде проводитися аналіз отриманих даних. Поблизу вертикальної осі графіка оберіть y. Якщо вісь координат Оy обрана вертикально, то графік матиме такий вигляд, як на рис. 5.
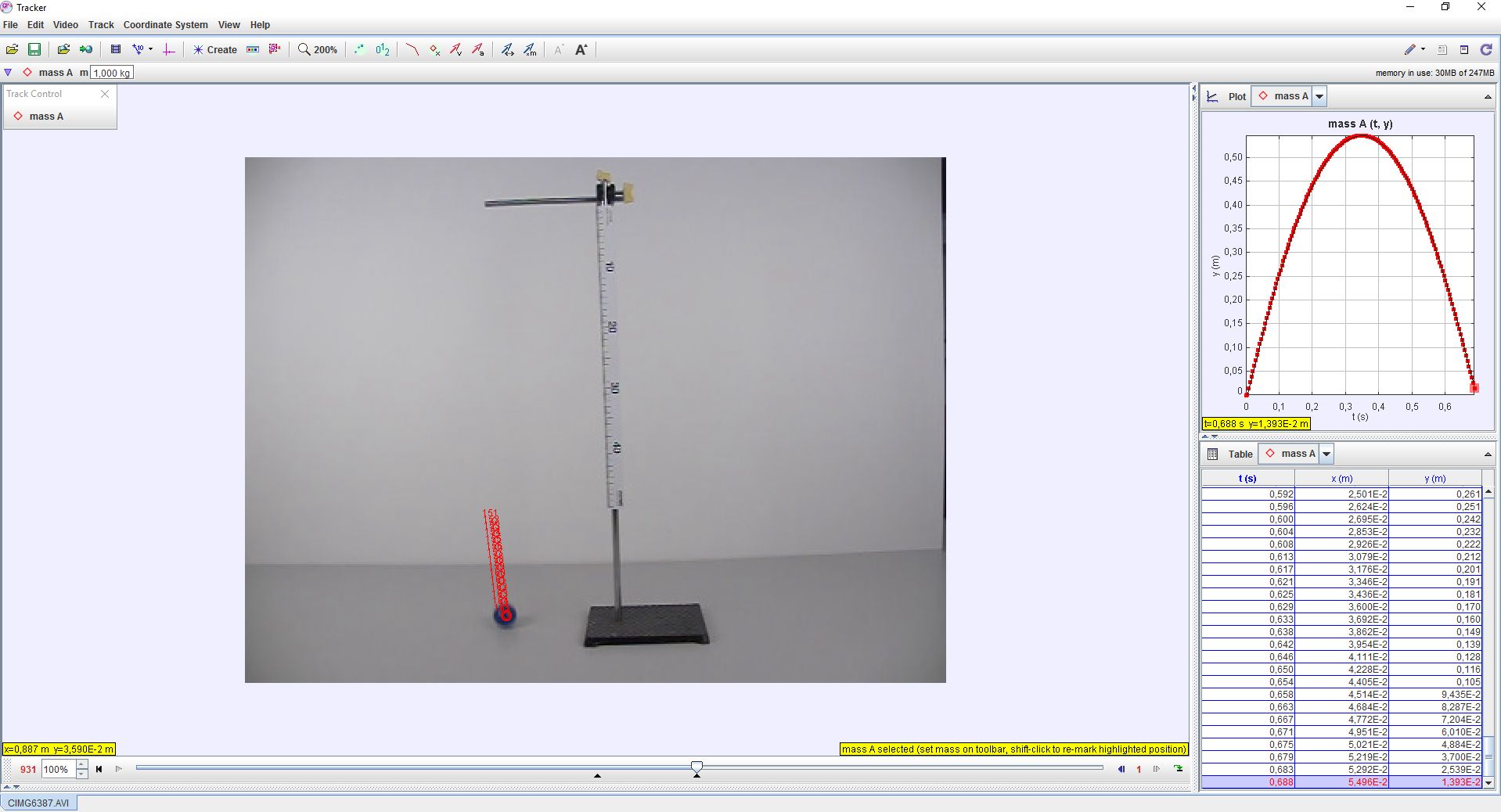
Рис. 5. Вигляд вікна програми Tracker після роботи автотрекінгу
Аналіз даних
- Оберіть у верхньому меню View → Data Tool (Analyze…).
- З’явиться нове вікно Data Tool з графіком і таблицею.
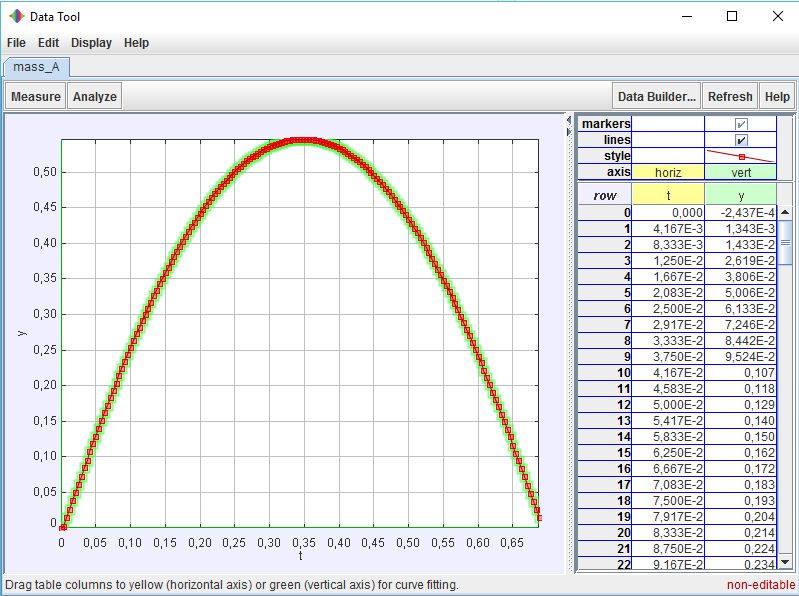
Рис. 6. Вигляд вікна Data Tool
- Оскільки графік y(t) є частиною параболи, то рух, який він описує, буде рівноприскореним. Рівняння руху тіла в такому випадку матиме вигляд квадратичної функції y(t) = ayt2/2 + v0yt + y0 . У загальному вигляді функція має запис f(x) = Ax2 + Bx + C . Бачимо, що коефіцієнт B = v0y . Для визначення початкової швидкості руху кульки у вертикальному напрямі необхідно знайти коефіцієнт B. Для визначення цього коефіцієнта накладемо на графік параболу.
- Оберіть вкладинку Analyse → Curve Fits та в нижній частині вікна Fit Name → Parabola. Поверх графіку руху з’явилася парабола та під нею – значення коефіцієнтів. Зверніть увагу на те, щоб біля надпису Autofit обов’язково стояв маркер. Це означає, що програма самостійно добере положення параболи. Визначте початкову швидкість кульки та занесіть до таблиці.
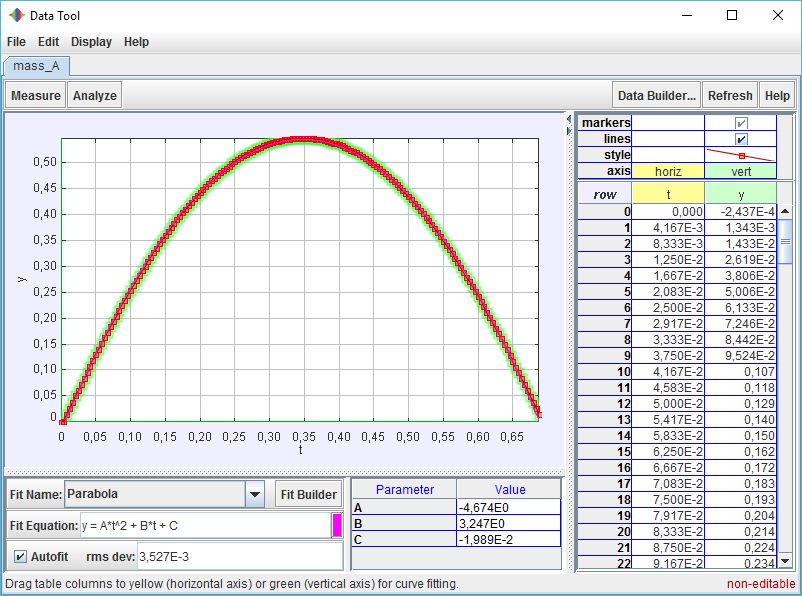
Рис. 7. Вигляд вікна Data Tool після накладання параболи
- У верхній вкладинці оберіть Analyse → Statistics. У таблиці праворуч знайдіть значення найбільшої висоти підняття h max, що відповідає максимальному значенню координати y. Занесіть його до таблиці.
- За формулою (2) розрахуйте значення початкової швидкості руху кульки та занесіть його до таблиці. Порівняйте це значення із попереднім та зробіть висновок.
Частина 4. Побудова моделі
- Закрийте вікно Data Tool. Поверніться до головного вікна програми. У верхній стрічці меню вимкніть позначку матеріальної точки та їх нумерацію
 . Увімкніть лінію траєкторії
. Увімкніть лінію траєкторії  .
. - Створимо динамічну модель руху кульки. Для цього оберіть у верхній стрічці меню Trake → New → Dynamic Particle Model → Cartesian. Остання стрічка визначає тип системи координат.
- З’явиться вікно побудови моделі та в лівому кутку додатково в панелі Track Control надпис model A і піктограма моделі.
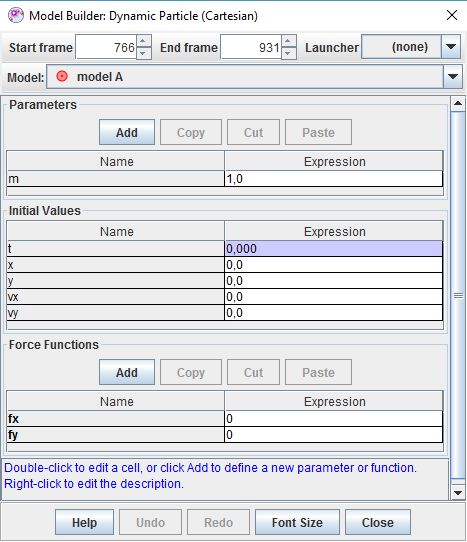
Рис. 8. Вигляд вікна Model Builder
- Для побудови моделі руху необхідно визначитися з усіма параметрами, які будуть використані у процесі побудови. Крок перший – установіть номер кінцевого кадру. Установіть зв’язок моделі з проаналізованим відео – у полі Launcher оберіть mass A. У стрічці Parameters уведіть значення маси кульки. Оберіть Add. Під стрічкою маса з’явиться стрічка parameter. Натиснувши праву кнопку маніпулятора на назві, оберіть для цього параметру позначку g. У правій частині таблиці двічі натисніть на значення та введіть 9,81. Таким чином, визначена маса кульки та усереднене значення прискорення вільного падіння. Перейдіть до заповнення поля Initial Values. Початкові координати моделі вже визначені прив’язкою до тіла. У стрічці vy введіть значення початкової швидкості кульки вздовж вертикалі, визначене у попередніх вимірах. Перейдіть у поле Force Function. Fx – це проекції сил, що діють вздовж горизонту. Fy – проекції сил, що діють вертикально. Оскільки розглядається тільки сила тяжіння, заповніть поле значення fy, ввівши –m*parameter. Можливі літери будуть видимі при заповненні. Просто оберіть із переліку.
- На зображенні з’явився трек моделі. Для оптимального відстежування увімкніть позначки тіл та моделі, обравши кнопку у верхньому меню. Перемістившись на перший кадр, відтворіть відеозапис. Якщо трек моделі не збігатиметься з дослідним треком – не враховані додаткові параметри, які впливають на рух кульки. Спробуйте змінювати параметри та їхні значення, намагаючись досягти оптимального суміщення моделі і дослідного треку.
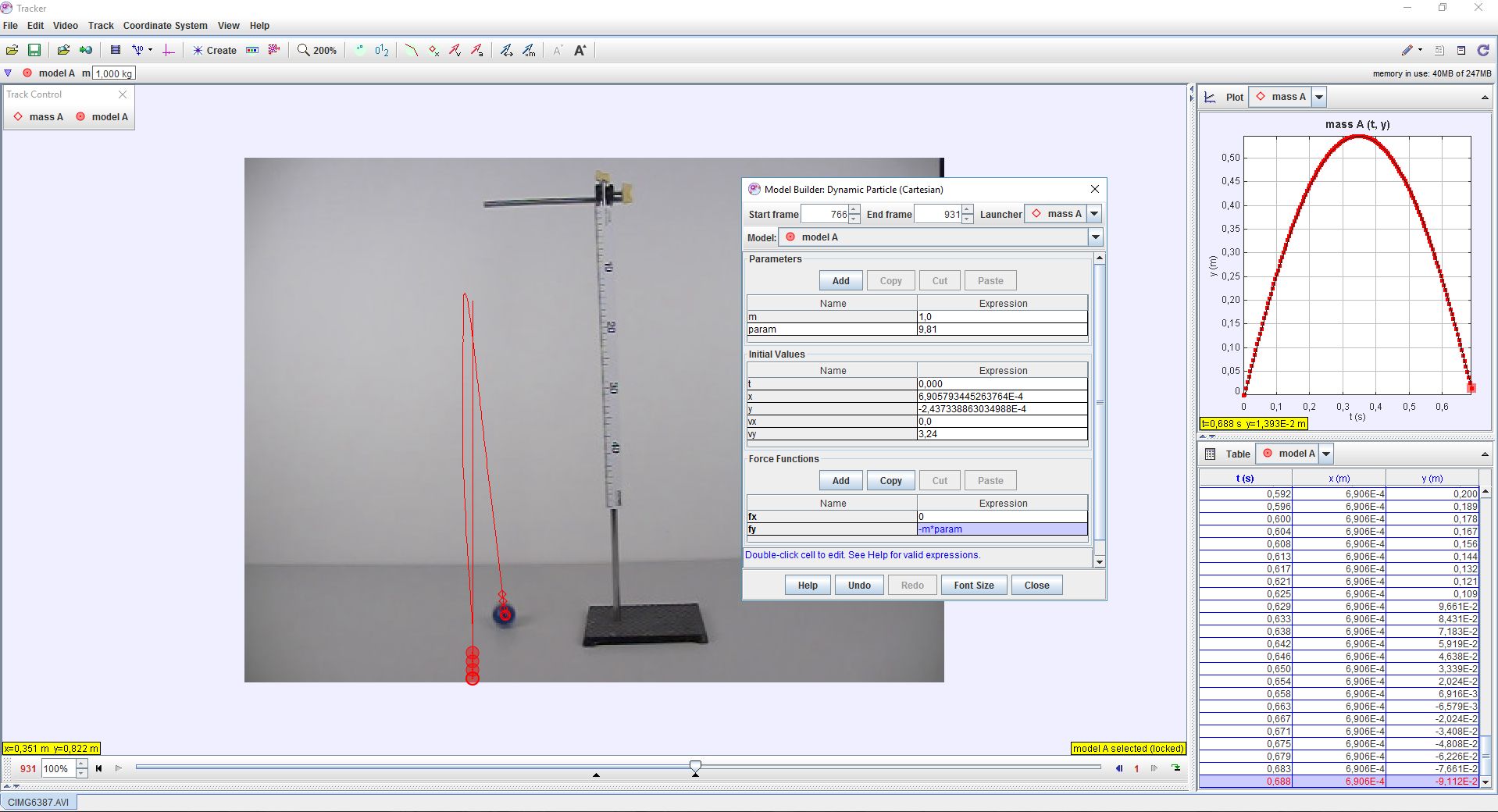
Рис. 9. Вигляд вікна при створенні моделі
Таблиця результатів
| Початкова швидкість тіла, визначена за кривою
v0y (м/с) |
Максимальна висота підйому тіла h max (м) | Початкова швидкість тіла, визначена за максимальною висотою підйому
v0y (м/с) |
|
|