Визначення коефіцієнта тертя кочення
Завідувач відділу створення навчально-тематичних систем знань НЦ «Мала академія наук України», кандидат педагогічних наук, голова Всеукраїнської громадської організації «Асоціація учителів фізики “Шлях освіти – ХХІ”». Наукові інтереси: моделювання освітніх та навчальних середовищ загальноосвітніх і позашкільних навчальних закладів з урахуванням трендів розвитку сучасних засобів навчання.
Завдання роботи:
- Провести декілька експериментів із похилим маятником та створити відеозаписи руху.
- Визначити інструментами програми для аналізу кути відхилення маятника після кожного повного коливання.
- Розрахувати коефіцієнт тертя кочення для різної кількості повних коливань та знайти середнє значення.
Обладнання:
похилий маятник, лінійка, ПК, цифровий фотоапарат або відеокамера, Tracker (http://physlets.org/tracker/)
Теоретична частина
Рис. 1. Зовнішній вигляд вікна програми Tracker
У цій роботі зазначене програмне забезпечення буде використовуватися для визначення коефіцієнта тертя кочення сталевої кулі поверхнею сталевої пластини.
У цьому експерименті використовується пристрій, який називається похилим маятником. Куля закріплена у підвісі, з’єднаному з металевим стрижнем. Стрижень може здійснювати коливний рух, опираючись на ребро призми. Під час руху куля котиться поверхнею пластини за невеликого кута нахилу її до вертикалі. В експерименті використовується кут у 5°. Проковзування між кулею і пластиною відсутнє. Відхиливши маятник на невеликий кут (орієнтовно 10°), фіксуємо зменшення кута відхилення маятника при кожному повному коливанні. Зменшення кута відхилення маятника зумовлене роботою сили тертя кочення. Для розрахунку коефіцієнта тертя кочення кулі послуговуються таким робочим виразом:
![]() (1),
(1),
де μк– коефіцієнт тертя кочення, R – радіус кулі (в нашому випадку R=0.01 м), α0 – початковий кут відхилення маятника (в радіанах), αn – кут відхилення маятника (в радіанах) після n-го повного коливання, β = 90°-γ, γ – кут нахилу площини до вертикалі (в нашому випадку β=85°).
Хід роботи
Частина 1. Отримання відеозапису
- Установіть на столі похилий маятник, відрегулюйте вертикальне положення його штатива та встановіть кут нахилу площини пластини до вертикалі у 5°. Кут відхилення встановлюється за виском, приєднаним до штатива маятника. Перевірте, щоб маятник рухався, торкаючись пластини без проковзування. Куля маятника має обертатися у підвісі з мінімальним тертям. Поряд із маятником у його площині встановіть лінійку.
- Оберіть пристрій, яким ви будете виконувати відеозйомку. З’ясуйте якість об’єктива для подальшого врахування можливих спотворень. Використайте стандартну частоту зйомки відео (25-30 кадрів на секунду).
- Установіть пристрій так, щоб установка повністю потрапляла в кадр і в процесі зйомки пристрій не рухався.
- Розпочніть запис відео. Відхиліть маятник на кут у 10° і відпустіть його. Зробіть декілька записів для добору кращого варіанту.
- У разі відсутності можливості відеозапису завантажте готове відео з ресурсу.
Частина 2. Опрацювання відео
- Завантажте відео у програму Tracker. Завантаження здійснюється з використанням кнопки Open у верхньому меню програми.
- Завантаження можна здійснити також шляхом «перетягування» файлу запису у вікно програми або через меню File → Import → Video. Якщо програма не дозволила завантажити відео, необхідно дібрати інший його формат, що здійснюється шляхом використання редакторів відео.
- Використовуючи кнопки керування в нижній частині вікна з відео, перегляньте запис.
- Якщо об’єктив пристрою для зйомки дає спотворення зображення, використайте відповідний фільтр відео.
- Установіть номер кадру, з якого буде відстежуватися рух маятника, і номер кадру, на якому закінчиться відстежування. Лічильник кадрів розташований у стрічці кнопок керування у вікні відеозапису.
- Оберіть у верхній стрічці кнопку Clip Settings
 . Випаде вікно встановлення меж кадрів відеозапису. Зазначте в ньому номер початкового та кінцевого кадру, крок зміни кадрів (якщо кадрів багато, то крок дає змогу зменшити кількість кадрів для аналізу) та частоту зйомки (за замовчуванням програма сама обирає цей параметр із властивостей відеозапису). Оберіть Ok.
. Випаде вікно встановлення меж кадрів відеозапису. Зазначте в ньому номер початкового та кінцевого кадру, крок зміни кадрів (якщо кадрів багато, то крок дає змогу зменшити кількість кадрів для аналізу) та частоту зйомки (за замовчуванням програма сама обирає цей параметр із властивостей відеозапису). Оберіть Ok. - Оберіть у верхній стрічці кнопку Show or hide the coordinate axes
 . На відеозаписі з’являться осі координат. Центр системи координат перетягніть у точку, що якнайкраще відповідатиме ситуації. Наприклад, сумістіть її з точкою підвісу маятника. Поверніть координатні осі так, щоб напрямок осі Ох збігався з вертикаллю. Повторно оберіть кнопку Show or hide the coordinate axes . Система координат зникне, але її положення програма запам’ятовує.
. На відеозаписі з’являться осі координат. Центр системи координат перетягніть у точку, що якнайкраще відповідатиме ситуації. Наприклад, сумістіть її з точкою підвісу маятника. Поверніть координатні осі так, щоб напрямок осі Ох збігався з вертикаллю. Повторно оберіть кнопку Show or hide the coordinate axes . Система координат зникне, але її положення програма запам’ятовує.
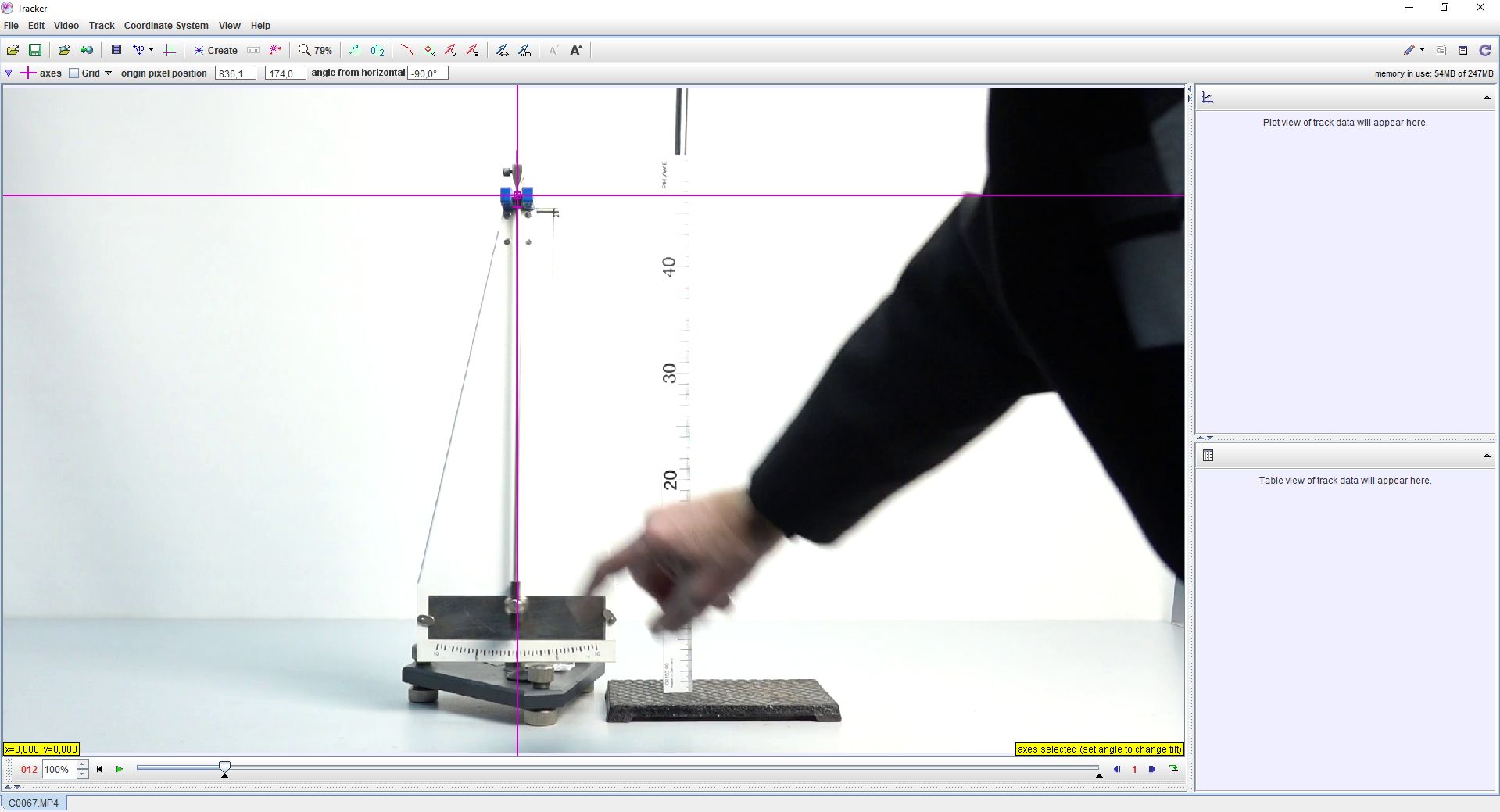
Рис. 2. Вигляд вікна програми Tracker після встановлення положення системи координат
- Оберіть у верхній стрічці кнопку Show, hide or create calibration tools та в меню – New → Calibration Stick
 . Програма запропонує, утримуючи клавішу Shift, обрати на зображенні першу та другу точку для одиничного відрізка. На відео з’явиться відрізок. Над відрізком необхідно в цифровому полі ввести значення довжини цього відрізка в метричній системі. Кінці відрізка можна вільно переміщувати «перетягуванням» по зображенню. Оберіть повторно кнопку Show, hide or create alibration tools . Одиничний відрізок зникне, але програма запам’ятає його положення та довжину.
. Програма запропонує, утримуючи клавішу Shift, обрати на зображенні першу та другу точку для одиничного відрізка. На відео з’явиться відрізок. Над відрізком необхідно в цифровому полі ввести значення довжини цього відрізка в метричній системі. Кінці відрізка можна вільно переміщувати «перетягуванням» по зображенню. Оберіть повторно кнопку Show, hide or create alibration tools . Одиничний відрізок зникне, але програма запам’ятає його положення та довжину. - Для відстежування руху кулі оберіть у верхньому меню кнопку Create і у меню – Point Mass.
- У лівому кутку з’явиться вікно Track Control.
- Натисніть клавішу Shift. Курсор набуде вигляду невеликої рамки. Сумістіть цю рамку з точкою на підвісі кулі, за якою ви буде стежити, і натисніть ліву кнопку маніпулятора. На зображенні з’явиться маркер точки, і програма автоматично перейде на наступний кадр.
- Поверніть запис на перший кадр та оберіть у верхньому меню функцію автотрекінгу, натиснувши кнопку
 .
. - У робочому вікні з’явиться вікно автотрекінгу.
- У цьому вікні зазначається, що буде відслідковуватися матеріальна точка, яку позначили на першому кадрі. Для подальшого автоматичного відстежування точки необхідно визначити ключовий кадр запису. Натисніть одночасно клавіші Ctrl і Shift. Курсор змінить свій зовнішній вигляд на коло з перехрестям. Укажіть маніпулятором точку і натисніть ліву кнопку маніпулятора. Навколо точки через певний час з’являться коло та пунктирна рамка. Коло буде охоплювати тіло, а рамка вказуватиме окіл на зображенні, в якому програма автоматично шукатиме його присутність. Розмір кола і рамки можна змінювати. У вікні автотрекінгу з’явиться збільшене зображення тіла на першому та наступному кадрі. Якість автотрекінгу залежить від того, наскільки змінюватиметься зображення тіла на кожному кадрі. У разі критичної зміни програма зупинить відстежування тіла і запропонує змінити окіл відстежування.
- Оберіть у вікні автотрекінгу кнопку Search і дочекайтеся результату. Якщо кількість кадрів для аналізу значна, це потребуватиме певного часу. Якщо при відстежуванні трапився збій, видалити попередні точки можна, обравши в цьому вікні кнопку Delete. Якість роботи автотрекінгу визначається багатьма умовами, але головною є контрастність зображення тіла щодо заднього фону. Після завершення роботи автотрекінгу закрийте його вікно.
- У вікнах правої частини з’являться графік і таблиця, з якими надалі буде проводитися аналіз отриманих даних.
Аналіз даних
- Оберіть у вікні графіка поблизу вертикальної осі кут радіус вектора θr.
- Оберіть у верхньому меню View → Data Tool (Analyze…).
- З’явиться нове вікно Data Tool з графіком і таблицею.
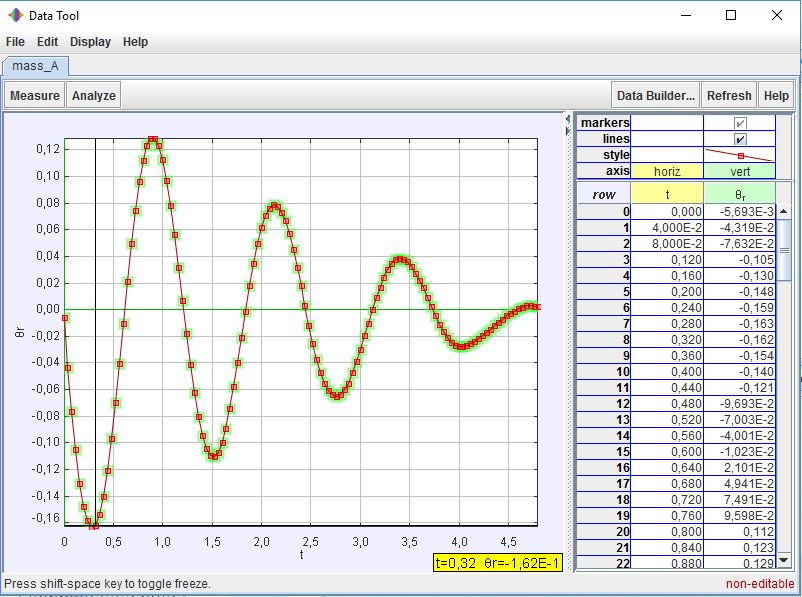
Рис. 3. Вигляд вікна Data Tool
- Оберіть вкладинку Meashure → Coordinates. Установіть курсор над першим максимумом або мінімумом графіка і зчитайте кут відхилення α0. Запишіть значення до таблиці. Перемістіть курсор на інший пік, що віддалений від першого на повне коливання, зчитайте кут і занотуйте до таблиці. Повторіть ці дії для інших піків, що віддалені на ціле число коливань.
- Обравши два кути, які відповідають цілому числу повних коливань, за формулою (1) розрахуйте коефіцієнт тертя кочення і запишіть його до таблиці. Повторіть цю дію для іншої пари кутів. Усі дані записуйте до таблиці.
- Розрахуйте середнє значення коефіцієнту тертя кочення та сформулюйте висновок до роботи.
Таблиця результатів
| Кут
α0 (рад) |
Кут
α1 (рад) |
Кут
α2 (рад) |
Кут
α3 (рад) |
μ1 | μ2 | μ3 | Середнє значення коефіцієнту тертя кочення
μср |