Перевірка основного рівняння динаміки обертового руху твердого тіла
Завідувач відділу створення навчально-тематичних систем знань НЦ «Мала академія наук України», кандидат педагогічних наук, голова Всеукраїнської громадської організації «Асоціація учителів фізики “Шлях освіти – ХХІ”». Наукові інтереси: моделювання освітніх та навчальних середовищ загальноосвітніх і позашкільних навчальних закладів з урахуванням трендів розвитку сучасних засобів навчання.
Завдання роботи:
- Провести експерименти з маятником Обербека та створити відеозапис його руху.
- Визначити лінійне прискорення вантажу в різних випадках.
- Розрахувати за вимірами кутове прискорення руху маятника, момент діючих сил, момент сил тертя та момент інерції маятника.
Обладнання:
маятник Обербека, лінійка, ПК, цифровий фотоапарат або відеокамера, Tracker (http://physlets.org/tracker/), Excel.
Теоретична частина

Рис. 1. Зовнішній вигляд вікна програми Tracker
Робота пов’язана з вивченням залежності між моментом діючих сил та кутовим прискоренням маятника Обербека. Ця залежність встановлюватиметься за умови, коли момент інерції маятника змінюватися не буде.
Маятник Обербека має вигляд колеса зі стрижнями, поєднаного з блоком. Блок приводиться в дію за допомогою нитки. У свою чергу, нитка перекинута через інший блок і з’єднується з набірним вантажем. Стрижні навантажуються рухомими однаковими вантажами, переміщенням яких можна балансувати маятник та змінювати його момент інерції. Змінюючи набірний вантаж, можна змінювати силу, яка прикладається до блока.
Для системи маятника Обербека основне рівняння динаміки матиме вигляд:
![]() (1),
(1),
де M – сумарний момент діючих сил, I – момент інерції системи, ε – кутове прискорення руху маятника.
На блок, пов’язаний із маятником, діють сила натягу нитки T та сила тертя в осі маятника Fтр. Ці сили створюють момент діючих сил. Тоді рівняння набуває вигляду:
![]() (2), або
(2), або
![]() (3), де
(3), де
МТ – момент сили натягу (обертовий момент), Mтер – момент сили тертя. Виходячи з вигляду рівняння, можна зробити висновок, що ця залежність є лінійною функцією. Графіком цієї функції є пряма, побудована в системі координат M(ε). Перетин цієї прямої з віссю моменту відповідатиме моменту сил тертя, а момент інерції маятника можна визначити зі співвідношення:
 (4).
(4).
З іншого боку, обертовий момент можна розрахувати за виразом:
![]() (5),
(5),
де m – маса вантажу, приєднаного до нитки, a – лінійне прискорення руху вантажу, r – радіус блока, що поєднаний із маятником (у нашому випадку r = 0.035 м). Кутове прискорення руху маятника пов’язане з лінійним прискоренням співвідношенням:
![]() (6).
(6).
Отже, зміст вимірювань у роботі зводитиметься до визначення лінійного прискорення руху вантажу за різних значень його маси.
Лінійне прискорення руху визначається інструментами програми для аналізу відеозаписів, а графік будується в математичних таблицях.
Хід роботи
Частина 1. Отримання відеозапису
- Установіть маятник Обербека та вирівняйте вертикальне положення його штатива. Використовуючи рухомі вантажі, збалансуйте колесо маятника так, щоб воно перебувало в байдужій рівновазі. Закріпіть на великому блоці маятника нитку та приєднайте до нею основу набірного вантажу (маса основи в нашому випадку 0,05 кг). Обертаючи блок, підніміть вантаж на деяку фіксовану висоту і зафіксуйте положення, увімкнувши електромагнітний утримувач блоку. Установіть поряд штатив та закріпіть у ньому лінійку.
- Оберіть пристрій, яким ви будете виконувати відеозйомку. З’ясуйте якість об’єктива для подальшого врахування можливих спотворень. Використайте стандартну частоту зйомки відео (25-30 кадрів на секунду).
- Установіть пристрій так, щоб установка повністю потрапляла в кадр і в процесі зйомки пристрій не рухався.
- Розпочніть відеозапис. Звільніть вантаж, розблокувавши утримувач. Після того, як вантаж пройде найнижче положення, зупиніть відезйомку. Зробіть ще декілька записів для можливості вибору найкращого варіанту.
- Щоразу збільшуючи масу набірного вантажу на 10 г, повторіть усі попередні дії.
- У разі відсутності можливості відеозапису завантажте готове відео з ресурсу.
Частина 2. Опрацювання відео
- Завантажте відео у програму Tracker. Завантаження здійснюється з використанням кнопки Open у верхньому меню програми.
- Завантаження можна здійснити також шляхом «перетягування» файлу запису у вікно програми або через меню File → Import → Video. Якщо програма не дозволила завантажити відео, необхідно дібрати інший його формат, що здійснюється шляхом використання редакторів відео.
- Використовуючи кнопки керування в нижній частині вікна з відео, перегляньте запис.
- Якщо об’єктив пристрою для зйомки дає спотворення зображення, використайте відповідний фільтр відео.
- Установіть номер кадру, з якого розпочався рух маятника, та номер кадру, коли вантаж досягнув найнижчої точки. Лічильник кадрів розташований у стрічці кнопок керування у вікні відеозапису.
- Оберіть у верхній стрічці кнопку Clip Settings
 . Випаде вікно встановлення меж кадрів відеозапису. Зазначте в ньому номер початкового та кінцевого кадру, крок зміни кадрів (якщо кадрів багато, то крок дає змогу зменшити кількість кадрів для аналізу) та частоту зйомки (за замовчуванням програма сама обирає цей параметр із властивостей відеозапису). Оберіть Ok.
. Випаде вікно встановлення меж кадрів відеозапису. Зазначте в ньому номер початкового та кінцевого кадру, крок зміни кадрів (якщо кадрів багато, то крок дає змогу зменшити кількість кадрів для аналізу) та частоту зйомки (за замовчуванням програма сама обирає цей параметр із властивостей відеозапису). Оберіть Ok. - Оберіть у верхній стрічці кнопку Show or hide the coordinate axes
 . На відеозаписі з’являться осі координат. Центр системи координат перетягніть у точку, що якнайкраще відповідатиме ситуації. Наприклад, сумістіть її з точкою на рухомому вантажі. Поверніть систему координат так, щоб вісь Ох збігалася з напрямком руху вантажу. Повторно оберіть кнопку Show or hide the coordinate axes . Система координат зникне, але її положення програма запам’ятовує.
. На відеозаписі з’являться осі координат. Центр системи координат перетягніть у точку, що якнайкраще відповідатиме ситуації. Наприклад, сумістіть її з точкою на рухомому вантажі. Поверніть систему координат так, щоб вісь Ох збігалася з напрямком руху вантажу. Повторно оберіть кнопку Show or hide the coordinate axes . Система координат зникне, але її положення програма запам’ятовує.
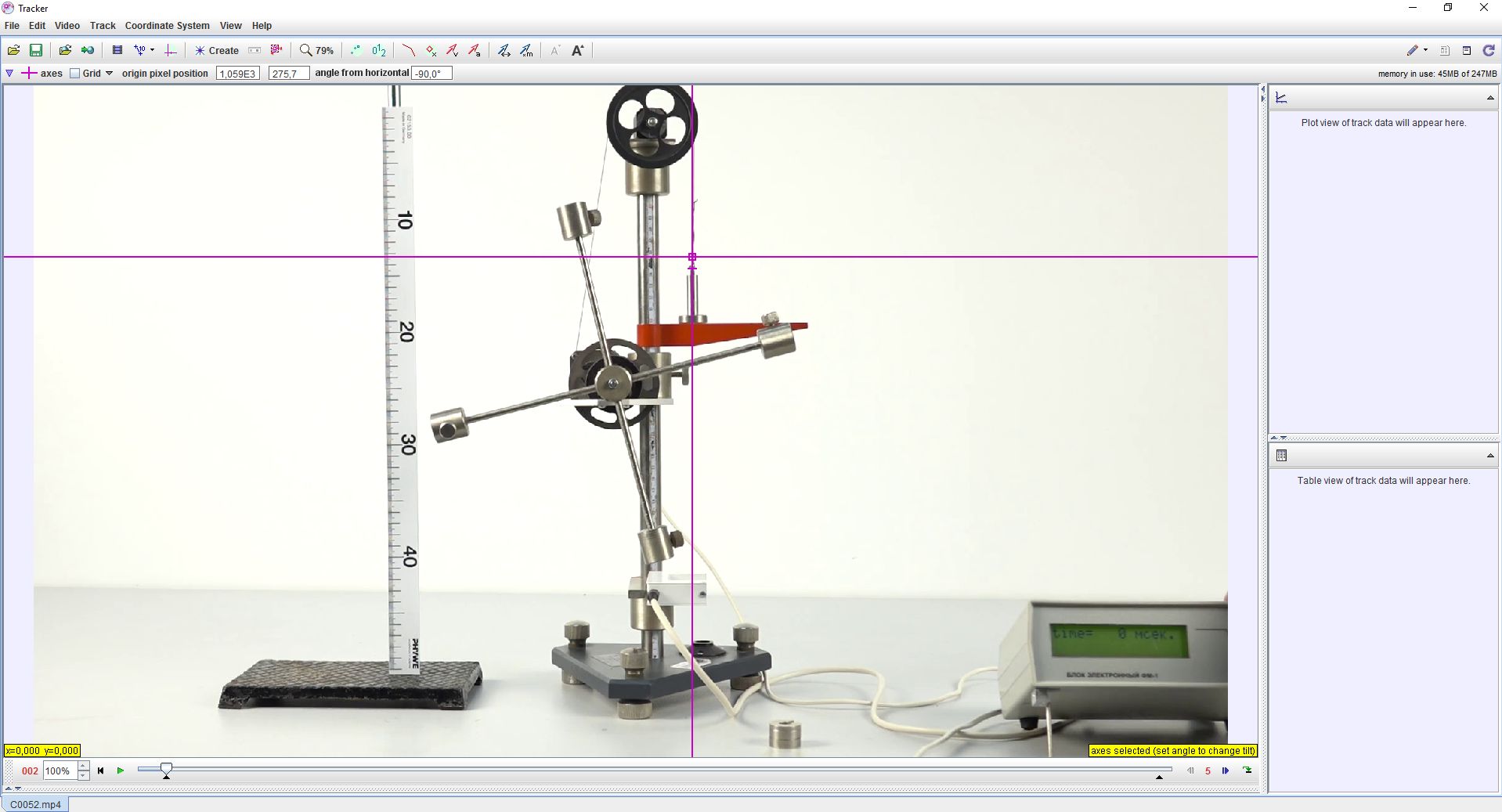
Рис. 2. Вигляд вікна програми Tracker після встановлення положення системи координат
- Оберіть у верхній стрічці кнопку Show, hide or create calibration tools та в меню – New → Calibration Stick
 . Програма запропонує, утримуючи клавішу Shift, обрати на зображенні першу та другу точку для одиничного відрізка. На відео з’явиться відрізок. Над відрізком необхідно в цифровому полі ввести значення довжини цього відрізка в метричній системі. Кінці відрізка можна вільно переміщувати «перетягуванням» по зображенню. Оберіть повторно кнопку Show, hide or create calibration tools . Одиничний відрізок зникне, але програма запам’ятає його положення та довжину.
. Програма запропонує, утримуючи клавішу Shift, обрати на зображенні першу та другу точку для одиничного відрізка. На відео з’явиться відрізок. Над відрізком необхідно в цифровому полі ввести значення довжини цього відрізка в метричній системі. Кінці відрізка можна вільно переміщувати «перетягуванням» по зображенню. Оберіть повторно кнопку Show, hide or create calibration tools . Одиничний відрізок зникне, але програма запам’ятає його положення та довжину. - Для відстежування руху тіла оберіть у верхньому меню кнопку Create і в меню – Point Mass.
- У лівому кутку з’явиться вікно Track Control.
- Натисніть клавішу Shift. Курсор набуде вигляду невеликої рамки. Сумістіть цю рамку з точкою, за якою ви буде стежити, і натисніть ліву кнопку маніпулятора. На зображенні з’явиться маркер точки, і програма автоматично перейде на наступний кадр. Повторюйте ці кроки до останнього обраного кадру. У вікнах правої частини з’являться графік і таблиця, з якими надалі буде проводитися аналіз отриманих даних.
Аналіз даних
Частина 3. Аналіз даних
- Оберіть у верхньому меню View → Data Tool (Analyze…).
- З’явиться нове вікно Data Tool з графіком і таблицею.
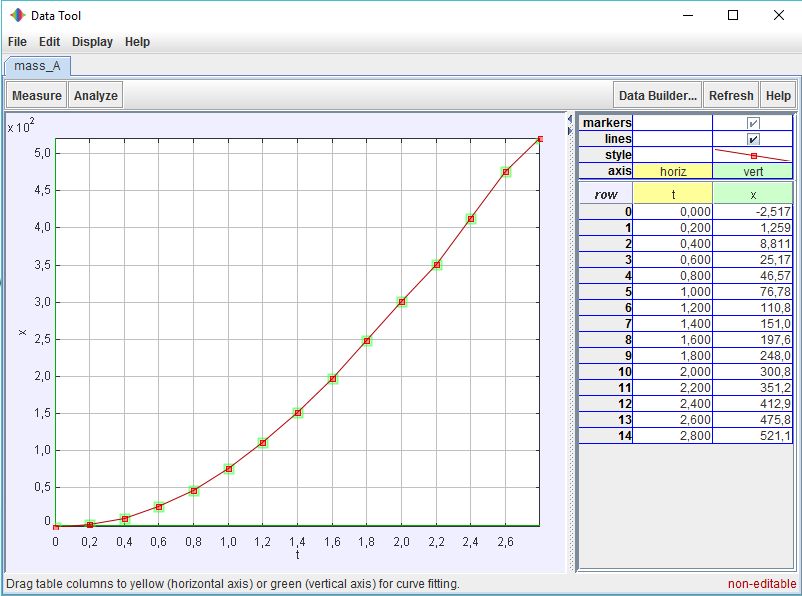
Рис. 3. Вигляд вікна Data Tool
- Оскільки графік x(t) є частиною параболи, то рух, який він описує, буде рівноприскореним. Рівняння руху тіла в такому випадку матиме вигляд квадратичної функції x(t) = at2/2 + v0t + x0 . У загальному вигляді функція має запис f(x) = Ax2 + Bx + C. Бачимо, що коефіцієнт A = a/2, а В = v0. Звідси прискорення a = 2A. Для визначення прискорення руху тіла необхідно знайти коефіцієнт А і помножити його на 2. Для визначення коефіцієнтів накладемо на графік параболу.
- Оберіть вкладинку Analyse → Curve Fits та в нижній частині вікна Fit Name → Parabola. Поверх графіку руху з’явилася парабола та під нею – значення коефіцієнтів. Зверніть увагу на те, щоб біля надпису Autofit обов’язково стояв маркер. Це означає, що програма самостійно добере положення параболи.
- Розрахуйте прискорення руху тіла a за коефіцієнтом А. Запис значення коефіцієнта здійснюється у стандартному вигляді. Занотуйте значення прискорення до таблиці.
- Повторіть усі попередні кроки для решти відеозаписів. Значення прискорень запишіть до таблиці.
- За експериментальним даними за допомогою формули (6) розрахуйте кутове прискорення руху для кожного випадку. За допомогою формули (5) розрахуйте обертовий момент сил у кожному випадку. Значення занотуйте до таблиці.
- За допомогою інструментів математичних таблиць побудуйте графік залежності M(ε). Побудуйте лінію тренду та встановіть вигляд рівняння прямої, що їй відповідає. Розрахуйте координату точки перетину графіка з віссю ординат. Це значення є числовим значенням моменту сил тертя, що діє на маятник. Кутовий коефіцієнт прямої є значенням моменту інерції системи. Запишіть отримані значення до таблиці.
- Зробіть висновок до роботи.
Таблиця результатів
| Маса вантажу
m,(кг) |
Лінійне прискорення руху вантажу
a, (м/с2) |
Кутове прискорення маятника
ε, (рад/с2) |
Момент обертових сил
MT ,(Н∙м) |
Момент сил тертя
Mтер , (Н∙м) |
Момент інерції системи
I (кг∙м2)
|